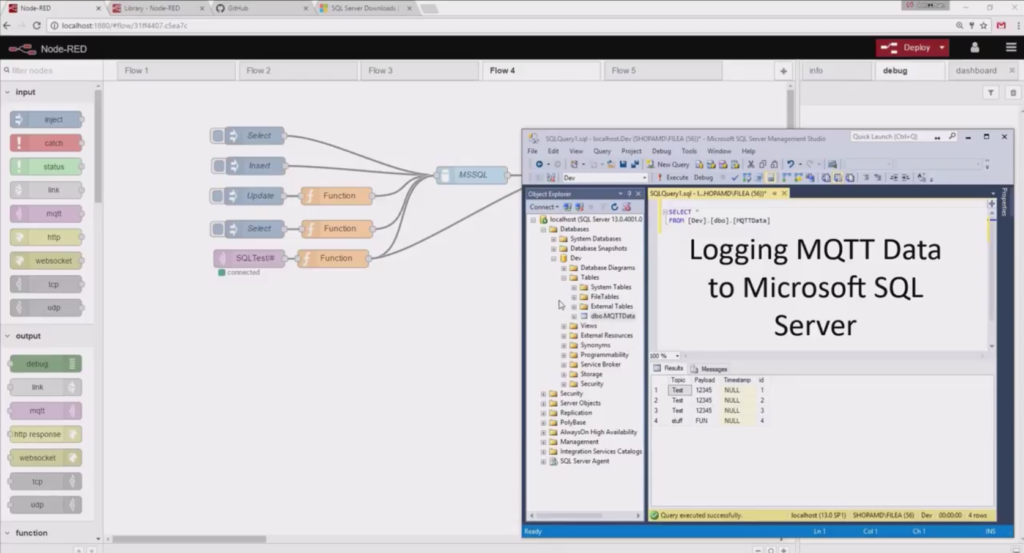
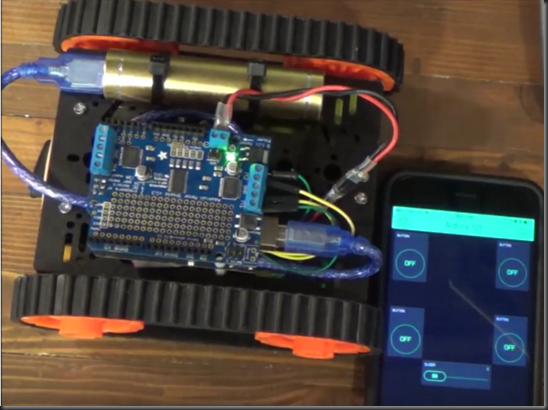
Technology related articles as time permits. From 3D printing, electronics, microcontrollers, industrial automation, and more. YouTube Channel WordPress on Godaddy can’t send email to its own domain After making a new wordpress site on my shared Godaddy host I fought an issue for hours where WordPress admin Using Microsoft SQL Server With Node-Red and MQTT SQLServer Node-Red and MQTT is awesome for real-time data, but what if you want to store and retrieve messages? Its What to do when Node-Red Flows dissapear I wanted to install a SSD on the Windows 10 desktop that my Node-Red ran on and ended up reinstalling DIY Arduino RC Mars Rover Mars rover remixed and inspired by bolbots mars rover on Thinigverse. http://www.thingiverse.com/thing:1583399 The rover uses an Arduino 101 for brains, DIY Kossel XL RepRap 3D Printer Build Kossel XL 2020 RepRap I used my first RepRap Mendel Prusa 2 to print my Kossel Mini. The Kossel Mini Intel Arduino 101 BLE Blynk Tank Intel Arduino 101 based tank with BLE and Blynk! This project uses the Intel Arduino 101 board that has Detecting Well Liquid loading with, Azure IoT, ML, and Pi Overview Legacy IIoT devices can be modernized utilizing edge of network devices to send data to the Azure IoT hub Hackster MQTT Presentation and Demonstration The August 2016 DFW Hackster MQTT meeting was a blast. Here is a link to the online presentation. https://sway.com/DpyBV3JjNYoTFrsx If Launch Node-Red On Startup With a Batch File I want Node-Red to start up (and other command line programs) when Windows 10 starts. Batch files are a simple Custom Cortana MQTT Commands Cortana can easily be extended to aid you with your DIY home automaton projects. In this example Cortana sends 1 2 3 … 9 Next » Go to the Blog