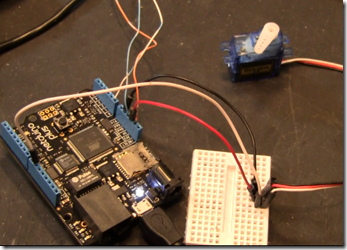
In this video I show how to connect a servo to a Netduino and also how to program the servo library into a new solution. The sweep program will drive the arm of the servo back and forth while the Knob program will move the arm of the servo when you turn a potentiometer.

Here is both solutions and a text file with the program that you can copy into a new solution.
If you don’t want to download the Zip file here is the code in three parts. First the Servo library class, then the sweep and knob programs.
I didn’t create the servo library class, an outstanding guy named Chris made it and I snagged it up off of the Netduino forum.
/*
* Servo NETMF Driver
* Coded by Chris Seto August 2010
* <chris@chrisseto.com>
*
* Use this code for whatveer you want. Modify it, redistribute it, I don’t care.
* I do ask that you please keep this header intact, however.
* If you modfy the driver, please include your contribution below:
*
* Chris Seto: Inital release (1.0)
* Chris Seto: Netduino port (1.0 -> Netduino branch)
* Chris Seto: bool pin state fix (1.1 -> Netduino branch)
*
* This code should be pasted into a new class.
*
* */
using System;
using Microsoft.SPOT.Hardware;
using SecretLabs.NETMF.Hardware;
namespace Servo_API
{
public class Servo : IDisposable
{
/// <summary>
/// PWM handle
/// </summary>
private PWM servo;
/// <summary>
/// Timings range
/// </summary>
private int[] range = new int[2];
/// <summary>
/// Set servo inversion
/// </summary>
public bool inverted = false;
/// <summary>
/// Create the PWM pin, set it low and configure timings
/// </summary>
/// <param name=”pin”></param>
public Servo(Cpu.Pin pin)
{
// Init the PWM pin
servo = new PWM((Cpu.Pin)pin);
servo.SetDutyCycle(0);
// Typical settings
range[0] = 1000;
range[1] = 2000;
}
public void Dispose()
{
disengage();
servo.Dispose();
}
/// <summary>
/// Allow the user to set cutom timings
/// </summary>
/// <param name=”fullLeft”></param>
/// <param name=”fullRight”></param>
public void setRange(int fullLeft, int fullRight)
{
range[1] = fullLeft;
range[0] = fullRight;
}
/// <summary>
/// Disengage the servo.
/// The servo motor will stop trying to maintain an angle
/// </summary>
public void disengage()
{
// See what the Netduino team say about this…
servo.SetDutyCycle(0);
}
/// <summary>
/// Set the servo degree
/// </summary>
public double Degree
{
set
{
/// Range checks
if (value > 180)
value = 180;
if (value < 0)
value = 0;
// Are we inverted?
if (inverted)
value = 180 – value;
// Set the pulse
servo.SetPulse(20000, (uint)map((long)value, 0, 180, range[0], range[1]));
}
}
/// <summary>
/// Used internally to map a value of one scale to another
/// </summary>
/// <param name=”x”></param>
/// <param name=”in_min”></param>
/// <param name=”in_max”></param>
/// <param name=”out_min”></param>
/// <param name=”out_max”></param>
/// <returns></returns>
private long map(long x, long in_min, long in_max, long out_min, long out_max)
{
return (x – in_min) * (out_max – out_min) / (in_max – in_min) + out_min;
}
}
}