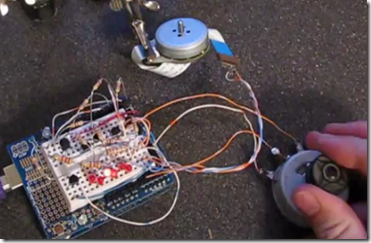
Here is my second ESC or Electronic Speed Control that I built with an Arduino Duemilanove. You can’t just hook DC up to Brushless DC Motors that you have scavenged out of old CDROM drives, hard drives, or printers and expect them to spin. Brushless DC motors require you to use a motor controller to produce a three phase DC square wave.

This project is just like my last ESC circuit but I have added a potentiometer for speed control. For more detailed information check out the last ESC post and video as well.Here are the project files including schematic and sketch.
PDF’s:Arduino ESC2.0
ZIP:ArduinoESC2.0
Here is the Arduino sketch.
——————————————————————